The 2016 Trieste Mini Maker Faire was quite a success, as was Trieste’s first ever Science Picnic! Read a reflection on the events with the co-organizers working at ICTP SciFabLab:

Trieste Mini Maker Faire 2016 ph Massimo Goina

The 2016 Trieste Mini Maker Faire was quite a success, as was Trieste’s first ever Science Picnic! Read a reflection on the events with the co-organizers working at ICTP SciFabLab:
Trieste Mini Maker Faire 2016 ph Massimo Goina
In occasione della festa del 2 giugno lo SciFabLab resterà chiuso. Saremo invece aperti sabato 4 Giugno, quando nel pomeriggio avremo un evento speciale per la European Maker Week: Maker’s DAY @ SciFabLab.
The SciFabLab will remain closed for a national holiday on Thursday, 2 June. We will be open on Saturdy 4 June, with a special event for the European Maker Week: Maker’s DAY @ SciFabLab.

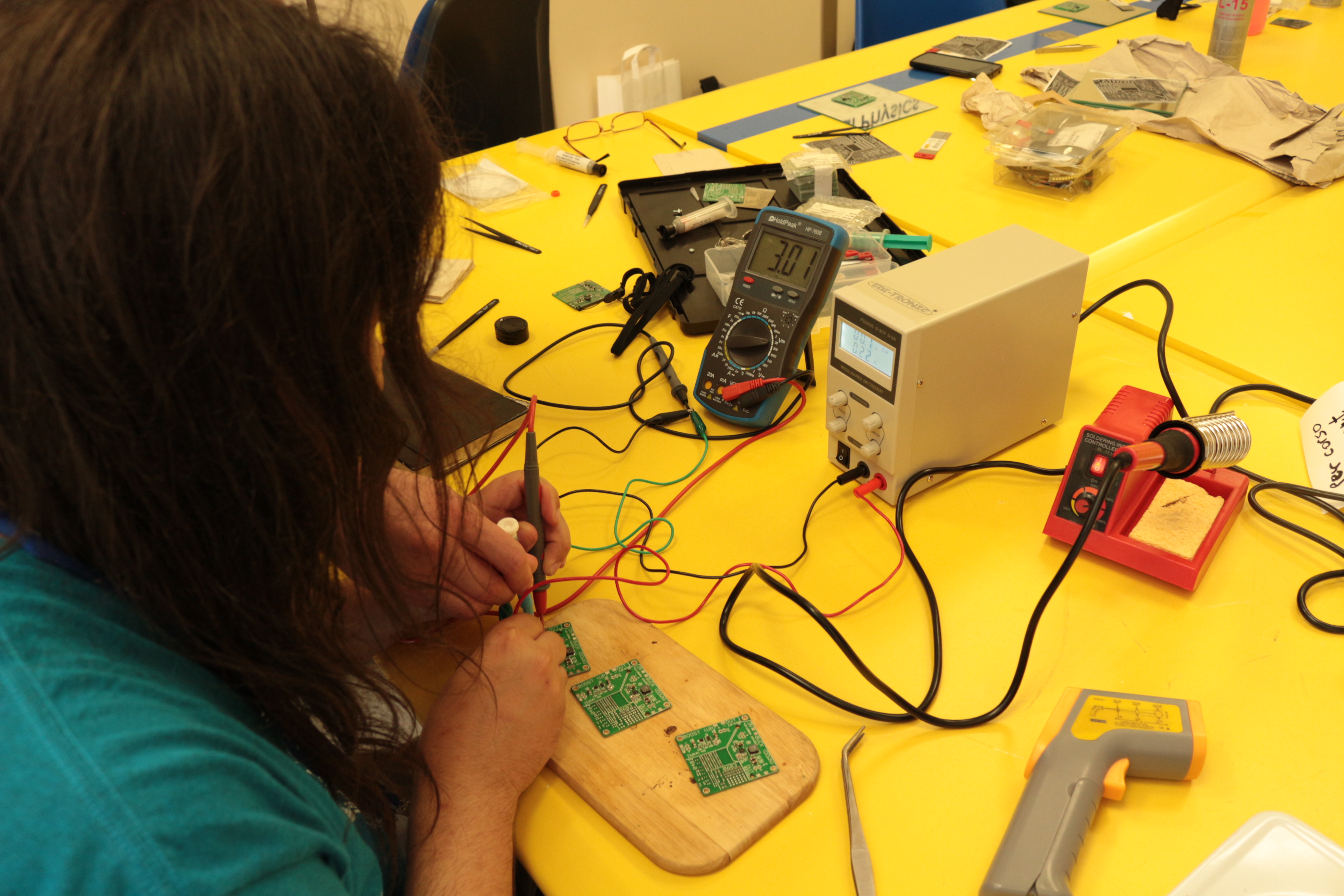
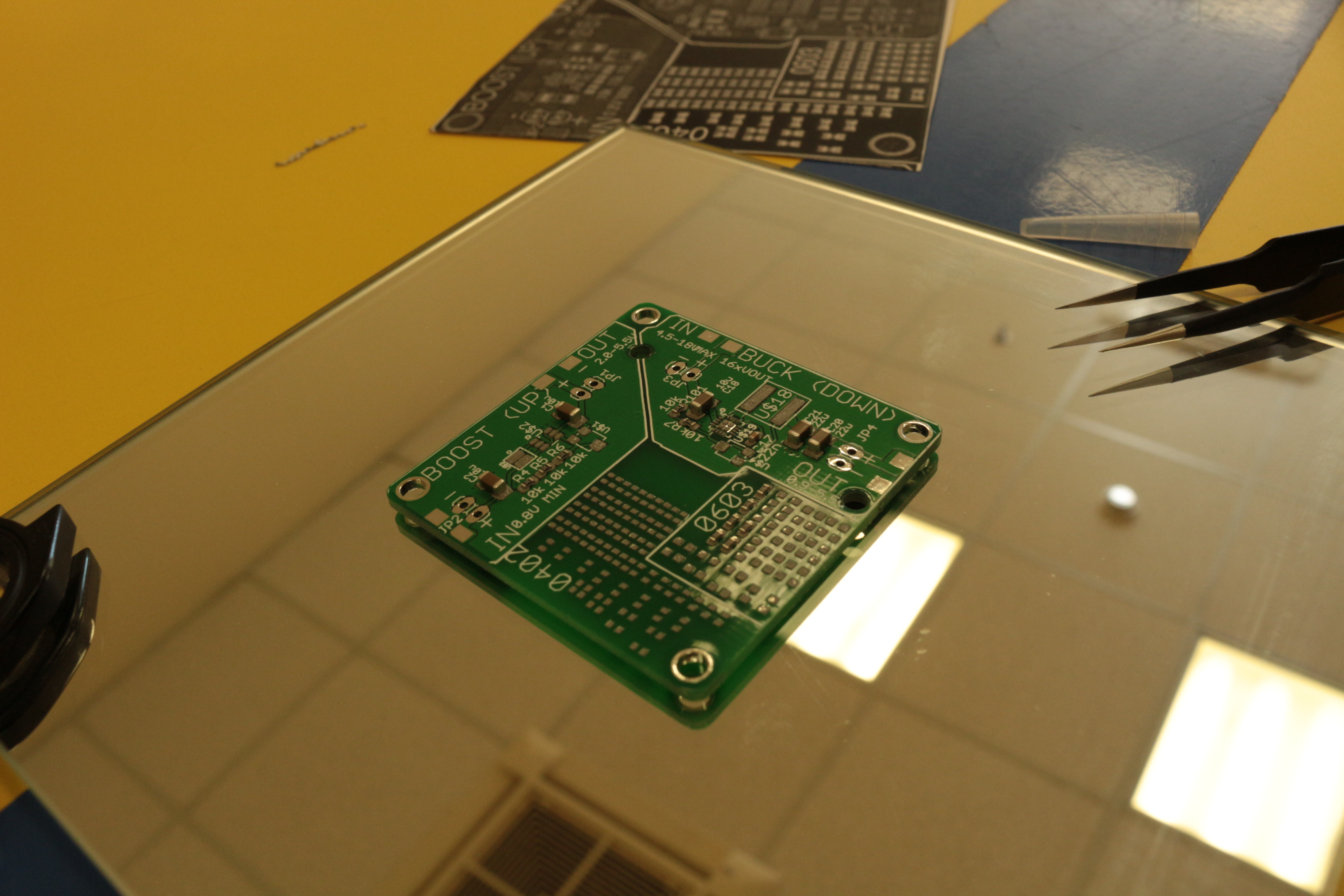
In questo workshop pratico della durata di circa 90 minuti imparerete a saldare componenti SMD con la tecnica del reflow usando strumenti economici e con un ottimo risultato finale.
Il workshop è tenuto da Kliment Yanev in lingua inglese (se richiesto dai partecipanti lo SciFabLab provvederà anche una traduzione in italiano) e sarà ripetuto due volte, alle ore 15:00 e alle ore 17:00 del giorno martedì 24 maggio. È richiesta la prenotazione via email a: scifablab@ictp.it (specificare nome, cognome e a quale delle due lezioni volete partecipare)
Il costo del PCB e componenti necessari per il corso è di 20 euro.
With this 90 minutes hands-on workshop you will learn to do Surface Mount assembly with the reflow technique, using low-cost tools and with an excellent result.
The workshop will be taught by Kliment Yanev in english and it will be repeated twice: at 3pm and 5pm of Tuesday, 24 May. You kindly ask you to book your preferred time by sending an email to: scifablab@ictp.it with your name and surname.
The cost of the PCB and SMD components required for the workshop is 20 euro.

Lo Scientific FabLab dell’ICTP sarà presente all’evento organizzato dall’Università degli Studi di Trieste in occasione dell’Internet Day nazionale e regionale di venerdì 29 aprile, intitolato “UniTS iDay: Scienza, Tecnologia e Società” che si terrà presso la residenza universitaria “ex Ospedale Militare” di via Fabio Severo 40 a Trieste. Durante tutta la giornata vi saranno numerose conferenze e dibattiti sullo stato di Internet e delle tecnologie digitali in Italia, tra cui un dialogo a tre intitolato “Racconti di stampa 3D e oggetti impossibili”, mentre al pomeriggio saranno aperti alcuni stand dimostrativi dal nome “Digital Lab” in cui verranno mostrati diversi ambiti di utilizzo delle moderne tecnologie digitali: dalla stampa 3D appunto (due stand: “Gli oggetti impossibili” -a cura di SciFabLab, e “3D Selfie” -a cura dell’Università di Trieste) agli e-wereables (“Tecnologia da indossare” -a cura di Gaya Fior), dalle comunicazioni digitali antiche e moderne (“Dal telegrafo a Telegram” -a cura dell’Università di Trieste) alle soluzioni tecnologiche di basso costo per le disabilità (“MANIpolare per comunicare” -a cura di Elena Dall’Antonia), dalle sfide dell’intelligenza artificiale (“Uomo e Macchina: chi vince?” -a cura dell’Università di Trieste) fino al cloud computing (“I primi passi nel cloud” -a cura di Eleonora Galimberti).
The ICTP Scientific Fablab will be present at the event organized by the University of Trieste (UniTS) in occasion of the national and regional “Internet Day” on Friday, 29 April, with the title of “UniTS iDay: Science, Technology and Society”, that will be held at the University Student Guesthouse “ex Ospedale Militare” in via Fabio Severo 40, Trieste. During the day there will be many conferences and panels (in italian) on the state of Internet and digital technologies in Italy, among them a panel discussion titled “Stories of 3D printing and impossible objects”, while in the afternoon there will be some exhibits under the name “Digital Lab”, in which various examples of modern digital technologies will be showcased to the public: from 3D printing (two exhibits: “Impossible objects” -by ICTP SciFabLab, and “3D Selfie” -by UniTS) to e-wereables (“Technology you can wear” -by Gaya Fior), from old and new digital communications (“Dal telegrafo a Telegram” -by UniTS) to low-cost technologies for disables (“MANIpolare per comunicare” -by Elena Dall’Antonia), from AI challenges (“Uomo e Macchina: chi vince?” -by UniTS) to cloud computing (“I primi passi nel cloud” -by Eleonora Galimberti).
Sabato 2 Aprile abbiamo tenuto nel nostro laboratorio il Genuino (o meglio conosciuto come Arduino) day. L’evento è iniziato alle 16 con la visita guidata all’interno del Fablab, mostrando le stampe 3D e gli oggetti realizzati con il taglio laser. L’evento è continuato con delle presentazioni (di cui è possibile scaricare le slides, link in fondo al post). La prima è stata tenuta da Gaya che ha illustrato alcuni esempi di e-wearables (per esempio come Arduino, collegato a dei LED, possa essere inserito all’interno dei vestiti facendoli illuminare, o per creare orecchini o sciarpe, oppure nelle tute da bicicletta per indicare la direzione che si vuole prendere). Successivamente ha parlato Federico spiegando le differenze fra le varie board esistenti, partendo dal classico “Arduino Uno” per arrivare a sistemi più complessi. Per concludere c’è stata la conferenza di Michele, dell’osservatorio astronomico di Trieste, che ha esposto come si può utilizzare Arduino per fare didattica in campo astronomico. Il progetto dimostrato durante la conferenza indica se un pianeta del sistema solare è o non è abitabile considerando la sua distanza dalla stella attorno alla quale orbita. Vi riportiamo la foto del progetto con la Terra selezionata.

Alle 19 il Genuino Day si è spostato dal nostro laboratorio fino in piazza della Borsa a Trieste, dove il Mittelab ha esposto alcuni progetti realizzati con Arduino.
Slides delle conferenze:
Scegliere la board (di Federico Deganis)
Astronomia Genuina (di Michele Maris)










Il pomeriggio di Sabato 2 Aprile, dalle 16 alle 19, anche lo SciFabLab celebrerà il Genuino Day, evento internazionale dedicato a Genuino (noto ai più con il nome precedente di Arduino), questa famosissima piattaforma a microcontrollore di basso costo e soprattutto Open Source / Open Hardware. L’evento è rivolto a tutti, con ingresso gratuito.
On the afternoon (4pm – 7pm) of Saturday, April 2nd, our SciFabLab will celebrate the Genuino Day, an international event devoted to Genuino (well known to most people with its former name of Arduino), this incredibly famous micro-controller platform, both low-cost and open source / open hardware. The event is open to all and the admission is free.
Domenica si è conclusa la prima edizione triestina ed italiana dell’hackathon. L’evento consisteva in una maratona informatica di 27 ore no stop. I partecipanti erano divisi in gruppi. I team potevano essere già formati all’iscrizione o si creavano al momento. Lo scopo della maratona era di inventare qualcosa che fosse utile alla comunità. All’interno del magazzino 26 c’era un nostro stand preposto per le stampe 3D di gadget, oggetti utili ai concorrenti ed altro ancora. Inoltre il nostro responsabile, Ernique Canessa, ha partecipato con un gruppo suo.
La competizione è iniziata intorno alle ore 9 di sabato. Durante tutta la giornata di sabato c’era un scambio continuo di persone facenti parte dei gruppi , di famigliari dei partecipanti o di interessati. Nel corso del pomeriggio venne istituito un piccolo laboratorio per i bambini. Quest’ultimi, tra le altre cose, potevano far muovere un robottino tramite il tablet. Per concludere la giornata di sabato, e tenere alti gli animi dei notturni hacker, dalle ore 22 hanno suonato vari dj e gruppi, tra le quali DJ Greta.
La mattina di domenica è stata un po’ più frenetica, in quanto mancavano poche ore alla fine della gara. Alle 12:30 la competizione si è conclusa. Al termine I gruppi hanno esposto ai giudici i loro elaborati. Nell’attesa del verdetto ogni gruppo aveva 3 minuti per esporre il proprio lavoro al pubblico. Inoltre venne creata una tavola rotonda nella quale, tra le altre cose, si parlava della differenza nell’approccio alla tecnologia tra i paesi sviluppati e quelli meno. “La differenza è che noi possiamo permetterci di sbagliare perché abbiamo le risorse per poterlo fare. Mentre nei paesi in via di sviluppo non si posso permettere di sbagliare poiché non hanno nessuno modo per ricomprare l’oggetto rotto” ci racconta Carlo Fonda.
Infine, Intorno alle 19:00, la giuria è arrivata ad un responso. Il vincitore della edizione dell’Hackathon è il team Parkloud ideatori del parcheggi intelligenti.
La prima edizione italiana è stata un successo, ottenendo un numero di iscritti del tutto superiore alle aspettative e l’attenzione dei media confermata dalla presenza de “Il Piccolo“. Speriamo dunque che sia la prima di tante edizioni.

Album fotografico
Preparativi






Gruppo FabLab

Istruzioni sulla gara.




I gruppi








I piccoli programmatori.
I trofei.


Esposizione del lavoro ai giudici.


















I vincitori.

Parteciperemo all’evento con uno stand nostro. Pertanto il laboratorio resterà chiuso nella giornata di sabato 19 Marzo.
Mercoledì 16 marzo si è svolta una lezione/conferenza (a cura dell’ICTP SciFabLab e su invito del prof. Simone Paternich) presso l’ISIA (Istituto Superiore Industrie Artistiche) di Firenze, un istituto statale di livello universitario che offre corsi triennali e specialistici in design del prodotto e della comunicazione. La lezione si è incentrata sulle tecnologie di stampa 3D e sulle loro applicazioni più interessanti per il design di oggetti. Iniziando con l’introduzione a tecnologie e macchine, con particolare attenzione a quelle di basso costo e open, si è brevemente accennato alla loro evoluzione storica per passare poi ad una breve guida pratica al loro utilizzo, scoprendo quali sono gli errori più comuni di modellazione o i problemi in fase di stampa che possono generare difetti nell’oggetto finito.
Questa parte introduttiva ha incluso anche una breve introduzione a come si può realizzare un oggetto 3D utilizzando OpenSCAD, un linguaggio di modellazione per chi si sente programmatore.
Infine nella seconda ed ultima parte sono stati analizzati alcuni oggetti progettati tenendo in debita considerazione i limiti ma soprattutto le peculiarità del processo di stampa 3D FDM, che permettono ad esempio di realizzare complesse parti meccaniche in movimento composte da diversi elementi, il tutto con una sola operazione di stampa, e soprattutto senza necessità di assemblaggio successivo (alcuni esempi utilizzati –tratti dall’immenso archivio di Thingiverse–sono stati: “Platform Jack“, “Wrench, Adjustable, Stubby“, “The Armadillo – A Case of Two Halves“, “Preassembled Spherical Geneva Drive“, “Gear Bearing” e “Blossoming Lamp“). Un altro esempio di oggetto “impossibile” che è realizzabile esclusivamente con il 3D printing è quello del giroide, una superficie geometrica che assomiglia ad una spugna e che presenta caratteristiche di grande interesse che la rendono -ad esempio- uno scambiatore termico ideale.
Slides della lezione: file PDF di 35MB (scaricabile, licenza CC by-sa)
Piccola galleria fotografia dell’evento.






Le interfacce per il controllo della domotica nascono dall’esigenzqa di collegare la grande varietà di elettrodomestici e dispositivi elettronici che, ormai da diversi anni, sono entrati in larga misura nella case degli utenti. Questi sistemi permettono, oltre un generale risparmio energetico, la gestione delle diverse funzioni della propria abitazione, siano esse il controllo della climatizzazione degli ambienti, la gestione dell’illuminazione e dei carichi elettrici, l’apertura e la chiusura di porte e finestre, il sistema di sorveglianza, etc. Un ambiente antropizzato può quindi essere gestito nella sua totalità grazie all’uso delle più svariate tecnologie: computer, touchscreen, smartphone, tablet, o ancora telecomandi e tastiere evolute. Il progetto Hand(s)Home vuole offrire un prototipo di interfaccia utente semplificato per la gestione della casa, che vuole porsi come esempio concreto di sistema universalmente accessibile. Il progetto realizzato è infatti inteso per essere alla portata di tutti: anziani, persone con difficoltà o disabilità fisiche, ma anche per l’utente medio o l’esperto in tecnologia che ha bisogno di una certa immediatezza e semplicità d’utilizzo. L’interfaccia proposta vuole essere un esempio di tecnologia a basso costo aperta al pubblico. L’idea alla base del progetto, costruito con materiali ed elettronica a basso costo, è che chiunque possa accedere ai file della programmazione e del design, così che la tecnologia possa essere riprodotta e migliorata da chiunque voglia proporne una propria implementazione. Il lavoro, che è stato la tesi di laurea magistrale di Giorgia Sperandio e che ha visto svolgersi la sua parte pratico-realizzativa presso l’ICTP SciFabLab, ha avuto inizio da un’analisi dello stato dell’arte nel campo delle interfacce utente (non solo in ambito domotico) e da una ricerca sulle caratteristiche delle interfacce domotiche presenti sul mercato. L’autrice si è poi dedicata al design, alla creazione e all’assemblaggio delle componenti, realizzate tramite stampa 3D e taglio laser. La parte di controllo ha invece sfruttato un microcontrollore Arduino Mega 2560, a cui sono state cablate le componenti necessarie per il funzionamento del sistema.
Si può comprare il libro che descrive il progetto sul sito dell’editore Sandit o prenderlo in prestito nel nostro laboratorio.