A questo punto abbiamo davanti una stampante calibrata termicamente e meccanicamente ossia con tutti i parametri corretti nel firmware e caricati nella scheda Arduino (capitolo precedente).
Ora bisogna fare alcuni test per verificare se i dati inseriti nel FW sono corretti.
Verifica preliminare
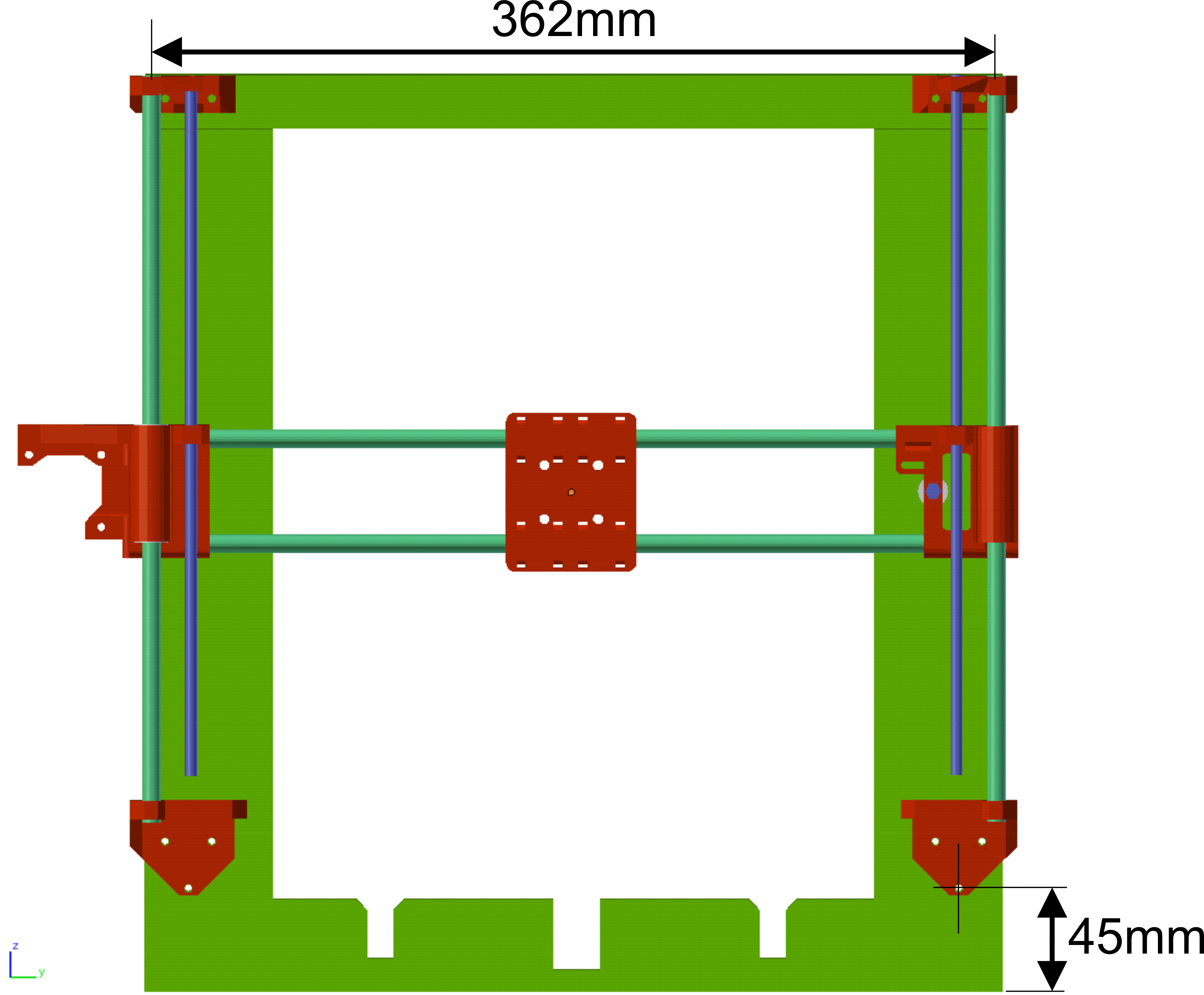
Prima di procedere con i test, verifichiamo che l’asse X e Y si muovano lungo tutta l’escursione possibile che ad una prima misurazione sul piano di stampa dovrebbe essere di 200x200mm
Un’altra verifica da fare è il parallellismo dell’asse X con l’asse Y.
In pratica si deve verificare che tra la punta dell’ugello ed il letto di stampa vi sia la stessa distanza sia con asse X tutto a destra che tutto a sinistra. Se non fosse così, si devono ruotare a mano i motori destro o sinistro e relative barre filettate per abbassare od alzare una o l’altra estremità in modo da renderle il più possibile parallele al letto di stampa. La regolazione fine la vedremo in fondo a questo capitolo regolando le viti del letto di stampa. Questa operazione va fatta a stampante spenta e mentre si ruota a mano un accoppiatore motore-barra, tenere fermo l’altro con le mani, in quanto tende a girare perchè alimentato dal moto di quello che si sta regolando (questi motori sono delle dinamo a 4 poli).
Qualora si noti che i motori non girino in modo regolare, che appaiano sotto sforzo e perdano passi, bisognerà controllare la loro corrente di assorbimento a vuoto.
A tal proposito allego una bella procedura per effettuare questa operazione.
Test quantità filamento trascinato.
Per questo test si deve smontare l’hot end dall’estrusore in modo da verificare che a fronte di un comando Gcode impartito per estrudere 10cm di filamento, sotto l’estrusore escano effettivamente 10 cm di filamento.
Smontato l’hotend con il suo dissipatore dal gruppo wade, inserire il filamento nell’idler e appena esce da sotto (ruotando a mano la ruota dentata grande), segnare con un pennarello indelebile il filamento in corrispondenza di un punto preciso di riferimento del gruppo wade.
Dal Pannello LCD PREPARA -> Muovi Asse -> 10mm -> E (come estrusore)
Ruotare la manopola per impostare 50mm, attendere che esca il filamento ed al termine segnare il filamento rispetto allo stesso punto di riferimento usato prima.
Se il motore di trascinamento del filo non dovesse muoversi in config.h commentare la riga #define EXTRUDE_MINTEMP xxx e riflashare.
Misurare con un righello la quantità di filamento uscita. Questa deve essere 50mm +/- 2mm di tolleranza.
Ripetere la prova con la stampante collegata al computer con l’interfaccia di comando Repetier host e con il cursore o impartendo un comando Gcode tipo G0 E100 per trascinare 100mm di filamento e fare la stessa verifica con il righello.
Nel caso in cui la lunghezza del filamento in uscita sia diversa dal valore impartito dal comando Gcode, si deve correggere l’errore con questo calcolo:
Nuovo valore E steps = Vecchio valore E steps * (100 / filamento misurato)
Volendo si può impostare temporaneamente il nuovo valore di E step con il comando
M92 Ennn e ripetere il test.
Se va bene inserire il valore in Marlin nella riga #define DEFAULT_AXIS_STEPS_PER_UNIT X,Y,Z,E
in corrispondenza con il valore E
Togliere il commento da #define EXTRUDE_MINTEMP xxx e riflashare e riassemblare l’hotend.
Per qualsiasi dubbio questa guida (già citata nel post precedente) è la bibbia:
http://reprap.org/wiki/Triffid_Hunter%27s_Calibration_Guide
Test movimenti degli assi.
Con questa verifica si va a controllare che il numero di step/mm inseriti nel firmware in #define DEFAULT_AXIS_STEPS_PER_UNIT per X,Y e Z siano corretti e che a fronte di un comando Gcode M92 Xnn oppure M92 Ynn o M92 Znn per lo spostamento di n cm nei tre assi, il carrello di stampa si muova effettivamente di questi cm.
Dal Pannello LCD PREPARA -> Muovi Asse -> 10mm -> X
Verifica temperature ottimale di fusione del filamento.
Senza la necessità di usare termometri di precisione o altro, si tratta verificare la temperatura ottimale dell’hotend per la fusione del PLA e dell’ABS.
La prima verifica da fare prima di riscaldare l’hot end, è la temperatura indicata nel display a stampante appena accesa e a temperatura ambiente.
Bene la temperatura indicata deve corrispondere (grado più grado meno) alla temperatura ambiente.
Se in questa condizione indica una temperatura ad esempio 7 gradi con temperatura ambiente di 18-20 gradi significa in modo lampante che il termistore impostato nel firmware non corrisponde con il termistore effettivamente montato sull’hotend.
Superato questo test passiamo alla verifica della temperatura ottimale di fusione del filamento.
PREMESSA: la temperatura ottimale di fusione del filamento può essere diversa da stampante a stampante. Dipende tutto dal termistore utilizzato e dalle calibrazioni di fabbrica della circuiteria elettronica di controllo sulla ramps. Ad esempio per un anno io ho estruso PLA a 200-220°C.
Cambiando estrusore ora estrudo il PLA a 195 gradi.
Per questa prova, alzare l’asse Z di 20-25mm e impostare sul pannello LCD la temperatura dell’ugello a 180°. L’hotend dovrebbe raggiungere la temperatura impostata in meno 3 minuti senza rimbalzi.
Attendere che arrivi in temperatura e se è tutto OK senza troppe escursioni termiche, inserire il filamento nell’estrusore. Prima di inserirlo, tagliarlo diagonalmente per facilitarne l’inserimento fino all’Hotend. Aiutarsi per questa operazione girando la ruota dentata grande con l’idler (premifilo) abbastanza stretto. Il filamento di PLA dovrebbe a poco a poco entrare nell’hot end e dall’ugello si dovrebbe scorgere l’uscita del filamento fuso. Dovrebbe uscire senza sforzare troppo sulla ruota dentata, in caso contrario, aumentare la temperatura a 200°.
La temperatura media di lavoro del PLA dovrebbe aggirarsi da 180° a 220°.
Il filino da 0.4mm deve uscire dall’ugello (girando a mano la ruota dentata grande) senza scoppiettii e senza fare fumo. Se dovesse invece fumare e scoppiettare, significa che non c’è corrispondenza tra temperatura indicata e temperatura effettiva. Questo a causa di un profilo termico non corretto. In tal caso documentarsi sul corretto profilo termico del termistore o cambiarlo con uno avente un profilo certificato e presente in Marlin.
Trovata la temperatura che sembra essere ottimale tra sforzo impiegato per spingere il filamento e qualità dell’estruso, usate questo valore per le impostazioni del filamento all’interno del SW di slicing.
Questa prova andrebbe fatta ogni volta che si cambia fornitore di PLA.
Tuttavia una volta pratici è possibile fare questa verifica poco prima che inizi la stampa ed eventualmente modificare a mano dal pannello LCD la temperatura di estrusione durante la stampa per trovare il valore perfetto da impostare nello slicer per le stampe successive.
La stessa prova va fatta con l’ABS. Per questo filamento la temperatura dovrebbe oscillare tra i 230° e i 240°.
Se poi nel corso della stampa l’hobbed bolt dovesse emettere degli “stak” rumori che indicano uno sforzo eccessivo nello spingere il filamento nell’hot end, alzare di 5 gradi la temperatura.
Sovente questi rumori vanno e vengono anche senza la necessità di aumentare e la temperatura soprattutto se ritenete che la qualità della stampa in corso sia buona.
Possono però essere anche sintomo di intasamento imminente.
Solo l’esperienza può aiutare.
Taratura ugello sul piatto di stampa.
Questa taratura permette di iniziare correttamente una stampa.
Se questa è fatta correttamente le parti aderiranno bene al piatto di stampa durante tutto il processo.
Se il letto di stampa non è riscaldato è bene rivestirlo con delle strisce più larghe possibile di nastro da carrozzeria per migliorare l’aderenza della parte. Generalmente in commercio si trova nastro da 4 o 5 cm di larghezza. I bordi delle varie strisce devono essere affiancati e coincidenti ma non sormontati.
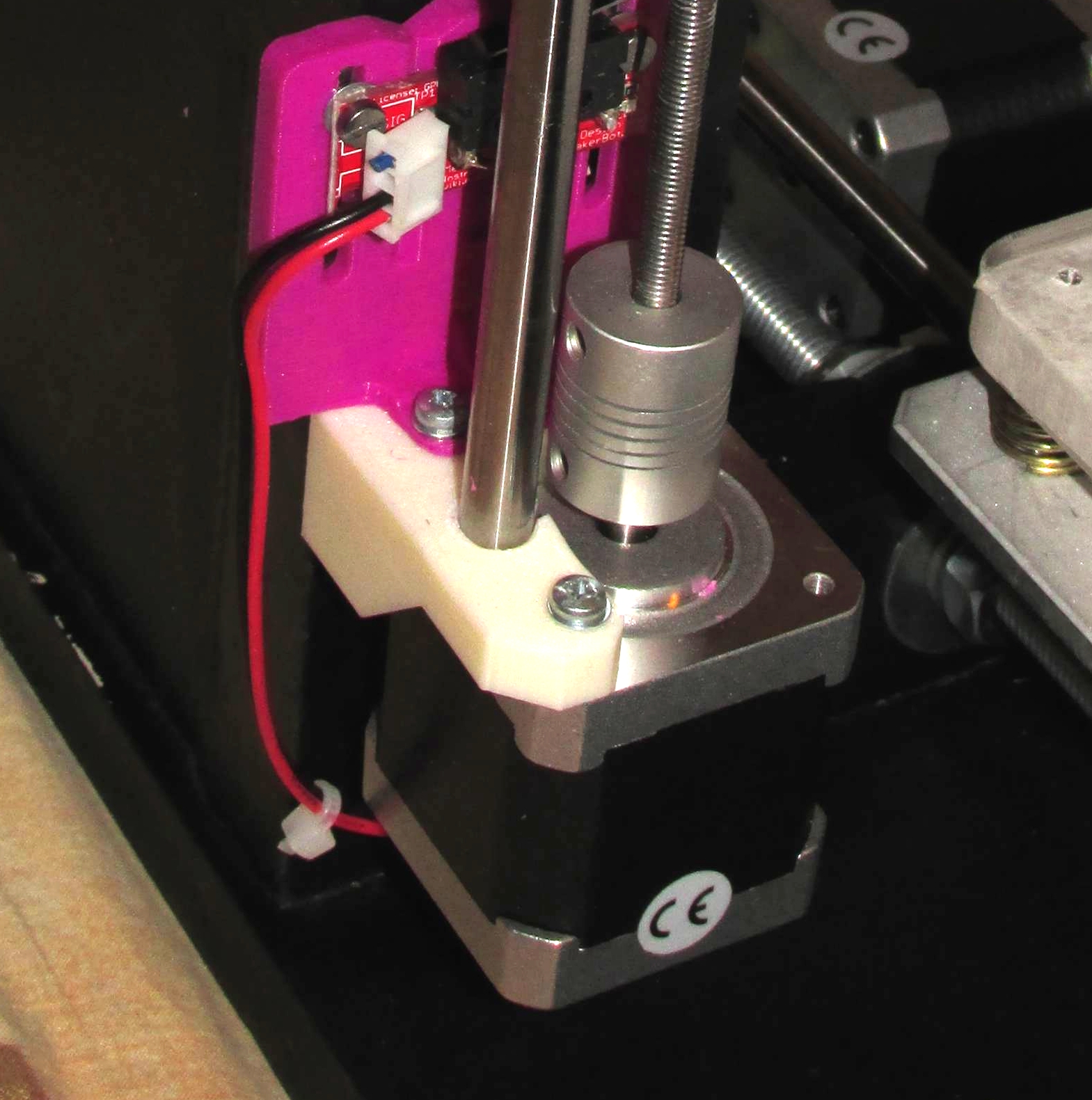
Regolare l’asse Z ruotando a mano i due stepper oppure impartire un comando di HOME e fare bene attenzione e bloccare eventualmente la discesa agendo a mano sull’endstop Z se dovesse essere starato in negativo. L’ugello non deve premere troppo sul piatto di stampa perchè si può deformare (è in ottone), perchè può rompersi il vetro e perchè può fracassarsi l’endstop. Eventualmente fermare la discesa poco prima dello zero agendo a mano sull’endstop Z e livellare a mano il piatto di stampa agendo sulle 4 viti agli angoli o ruotando gli assi dei due motori Z avvicinando a poco a poco l’ugello alla superficie di stampa.
L’ugello deve sfiorare letteralmente il letto di stampa. Solitamente si usa frapporre un semplice foglio di carta grana 80 tra l’ugello e il letto di stampa e questo deve poter scorrere orizzontalmente con un leggero attrito.
Questa verifica va effettuata sui 4 angoli e al centro del letto di stampa.
Fatta correttamente questa verifica si può dare inizio alle stampe.